山东大学学报 (医学版) ›› 2023, Vol. 61 ›› Issue (3): 46-56.doi: 10.6040/j.issn.1671-7554.0.2023.0018
杜付鑫1,张体冲1,李倩倩2,宋锐3,*( )
)
Fuxin DU1,Tichong ZHANG1,Qianqian LI2,Rui SONG3,*()
摘要:
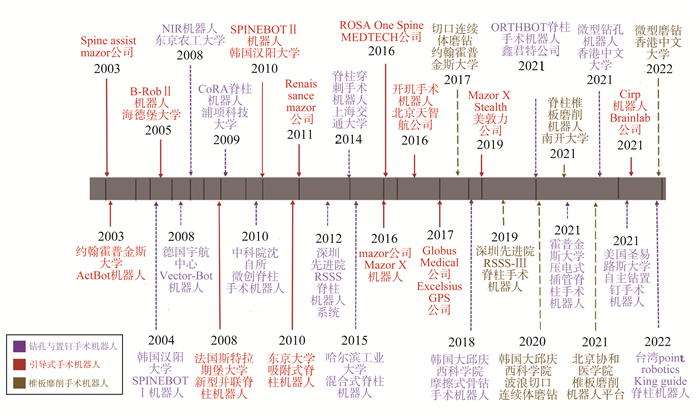
脊柱手术机器人具有定位精准、操作稳定、减少辐射暴露等优势,具有极大的临床应用价值,近年来已成为机器人研究和应用的热点领域。论文根据不同应用场景将脊柱手术机器人按引导式和主动操作式两种进行分类,并对应介绍国内外研究机构和公司研发的脊柱机器人及最新成果,同时结合研究和应用现状,对脊柱机器人应用的关键技术和未来机器人发展趋势进行简要阐述和总结。
中图分类号:
| 1 |
Sukovich W , Brink-Danan S , Hardenbrook M . Miniature robotic guidance for pedicle screw placement in posterior spinal fusion: early clinical experience with the SpineAssist[J]. Int J Med Robot, 2006, 2 (2): 114- 122.
doi: 10.1002/rcs.86 |
| 2 | Togawa D , Kayanja MM , Reinhardt MK , et al. Bone-mounted miniature robotic guidance for pedicle screw and translaminar facet screw placement: part 2: evaluation of system accuracy[J]. Neurosurgery, 2007, 60 (2): 129- 139. |
| 3 |
Khan A , Meyers JE , Siasios I , et al. Next-generation robotic spine surgery: first report on feasibility, safety, and learning curve[J]. Oper Neurosurg (Hagerstown), 2019, 17 (1): 61- 69.
doi: 10.1093/ons/opy280 |
| 4 |
Lefranc M , Peltier J . Evaluation of the ROSATM Spine robot for minimally invasive surgical procedures[J]. Expert Rev Med Devices, 2016, 13 (10): 899- 906.
doi: 10.1080/17434440.2016.1236680 |
| 5 |
Stoianovici D , Cleary K , Patriciu A , et al. AcuBot: a robot for radiological interventions[J]. IEEE Trans Robotics Autom, 2003, 19 (5): 927- 930.
doi: 10.1109/TRA.2003.817072 |
| 6 |
Korb W , Kornfeld M , Birkfellner W , et al. Risk analysis and safety assessment in surgical robotics: a case study on a biopsy robot[J]. Minim Invasive Ther Allied Technol, 2005, 14 (1): 23- 31.
doi: 10.1080/13645700510010827 |
| 7 |
Maurin B , Bayle B , Piccin O , et al. A patient-mounted robotic platform for CT-scan guided procedures[J]. IEEE Trans Biomed Eng, 2008, 55 (10): 2417- 2425.
doi: 10.1109/TBME.2008.919882 |
| 8 | Bekku A, Kim J, Nakajima Y, et al. A body-mounted surgical assistance robot for minimally invasive spinal puncture surgery[C]//5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. Sao Paulo: IEEE, 2014: 19-23. |
| 9 |
Chung J , Kim S , Yi BJ , et al. Cadaver study for spinal fusion surgery using an image-guided surgical robot system[J]. Int J Control Autom Syst, 2010, 8 (3): 564- 573.
doi: 10.1007/s12555-010-0309-2 |
| 10 |
田伟, 王晋超, 刘亚军, 等. 上颈椎手术方式回顾及应用机器人辅助上颈椎手术的体会[J]. 中国医疗器械信息, 2017, 23 (7): 9- 13.
doi: 10.3969/j.issn.1006-6586.2017.07.002 |
|
TIAN Wei , WANG Jinchao , LIU Yajun , et al. Review of upper cervical spine surgery and application experience of robot assisted upper cervical[J]. China Medical Device Information, 2017, 23 (7): 9- 13.
doi: 10.3969/j.issn.1006-6586.2017.07.002 |
|
| 11 |
Tian W , Liu YJ , Liu B , et al. Guideline for thoracolumbar pedicle screw placement assisted by orthopaedic surgical robot[J]. Orthop Surg, 2019, 11 (2): 153- 159.
doi: 10.1111/os.12453 |
| 12 | Chung GB , Kim S , Lee SG , et al. An image-guided robotic surgery system for spinal fusion[J]. Int J Control Autom Syst, 2006, 4 (1): 30- 41. |
| 13 |
Ortmaier T , Weiss H , Döbele S , et al. Experiments on robot-assisted navigated drilling and milling of bones for pedicle screw placement[J]. Int J Med Robot, 2006, 2 (4): 350- 363.
doi: 10.1002/rcs.114 |
| 14 | Lee J, Kim K, Chung WK, et al. Human-guided surgical robot system for spinal fusion surgery: CoRASS[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena: IEEE, 2008: 3881-3887. |
| 15 |
Shim S , Choi H , Ji D , et al. Robotic system for bone drilling using a rolling friction mechanism[J]. IEEE/ASME Trans Mechatron, 2018, 23 (5): 2295- 2305.
doi: 10.1109/TMECH.2018.2854890 |
| 16 |
Onogi S , Nakajima Y , Koyama T , et al. Robotic vertebral puncture system for percutaneous vertbroplasty[J]. J Med Biol Eng, 2013, 33 (5): 491- 496.
doi: 10.5405/jmbe.954 |
| 17 | 张鹤. 脊柱微创手术机器人系统(遥控型)及关键技术研究[D]. 重庆: 第三军医大学, 2012. |
| 18 |
Jin HY , Hu Y , Tian W , et al. Kinematics and cooperative control of a robotic spinal surgery system[J]. Robotica, 2016, 34 (1): 226- 242.
doi: 10.1017/S0263574714001283 |
| 19 |
Rezazadeh S , Bai WB , Sun MJ , et al. Robotic spinal surgery system with force feedback for teleoperated drilling[J]. J Eng, 2019, 2019 (14): 500- 505.
doi: 10.1049/joe.2018.9407 |
| 20 | 李少东. 机器人辅助脊柱微创手术系统及其导航和力控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| 21 |
Hu Y , Jin HY , Zhang LW , et al. State recognition of pedicle drilling with force sensing in a robotic spinal surgical system[J]. IEEE/ASME Trans Mechatron, 2014, 19 (1): 357- 365.
doi: 10.1109/TMECH.2012.2237179 |
| 22 |
Sun Y , Jiang ZL , Qi XZ , et al. Robot-assisted decompressive laminectomy planning based on 3D medical image[J]. IEEE Access, 2018, 6, 22557- 22569.
doi: 10.1109/ACCESS.2018.2828641 |
| 23 |
Jiang ZL , Qi XZ , Sun Y , et al. Cutting depth monitoring based on milling force for robot-assisted laminectomy[J]. IEEE Trans Autom Sci Eng, 2020, 17 (1): 2- 14.
doi: 10.1109/TASE.2019.2920133 |
| 24 |
Li M , Qi XZ , Sun Y , et al. A stability and safety control method in robot-assisted decompressive laminectomy considering respiration and deformation of spine[J]. IEEE Trans Autom Sci Eng, 2023, 20 (1): 258- 270.
doi: 10.1109/TASE.2022.3147270 |
| 25 | Xia GM, Yao B, Dai Y, et al. Cutting Depth Compensation Based on Milling Acoustic Signal for Robotic-Assisted Laminectomy[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, IEEE, 2021: 12464-12469. |
| 26 |
Xia GM , Jiang ZF , Zhang JX , et al. Sound pressure signal-based bone cutting depth control in robotic vertebral Lamina milling[J]. IEEE Sens J, 2022, 22 (11): 10708- 10718.
doi: 10.1109/JSEN.2022.3167664 |
| 27 |
Xia GM , Wang JG , Dai Y , et al. Vibration-based cutting depth control and angle adjustment of robotic curved bone milling[J]. IEEE Trans Instrum Meas, 2022, 71, 1- 10.
doi: 10.1109/TIM.2022.3191714 |
| 28 | 屈昊. 脊柱术区组织多模态信息感知及在机器人辅助手术中的实验研究[D]. 北京: 北京协和医学院, 2021. |
| 29 | 李琨伦. 机器人辅助脊柱椎板减压手术影像交互与恒力切削控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| 30 | Smith AD , Chapin J , Birinyi PV , et al. Automated polyaxial screw placement using a commercial-robot-based, image-guided spine surgery system[J]. IEEE Trans Med Robotics Bionics, 2020, 3 (1): 74- 84. |
| 31 | Opfermann JD, Killeen BD, Bailey C, et al. Feasibility of a Cannula-mounted piezo robot for image-guided vertebral augmentation: toward a low cost, semi-autonomous approach[C]//2021 IEEE 21st International Conference on Bioinformatics and Bioengineering (BIBE). Kragujevac, IEEE, 2021: 1-8. |
| 32 |
Alambeigi F , Wang Y , Sefati S , et al. A curved-drilling approach in core decompression of the femoral head osteonecrosis using a continuum manipulator[J]. IEEE Robotics Autom Lett, 2017, 2 (3): 1480- 1487.
doi: 10.1109/LRA.2017.2668469 |
| 33 |
Kim S , Shim S , Ji D , et al. Wave-shaped notched compliant joint with high rigidity[J]. IEEE Robotics Autom Lett, 2022, 7 (4): 10168- 10175.
doi: 10.1109/LRA.2022.3192607 |
| 34 |
Wang Y , Yip HW , Zheng H , et al. Design and experimental validation of a miniaturized robotic tendon-driven articulated surgical drill for enhancing distal dexterity in minimally invasive spine fusion[J]. IEEE/ASME Trans Mechatron, 2021, 26 (4): 1858- 1866.
doi: 10.1109/TMECH.2021.3077706 |
| 35 |
Wang Y , Zheng H , Taylor RH , et al. A handheld steerable surgical drill with a novel miniaturized articulated joint module for dexterous confined-space bone work[J]. IEEE Trans Biomed Eng, 2022, 69 (9): 2926- 2934.
doi: 10.1109/TBME.2022.3157818 |
| 36 |
Qi XZ , Meng J , Li M , et al. An automatic path planning method of pedicle screw placement based on preoperative CT images[J]. IEEE Trans Med Robotics Bionics, 2022, 4 (2): 403- 413.
doi: 10.1109/TMRB.2022.3155288 |
| [1] | 张小艳 李刚 王令平. 不同剂量舒芬太尼对脊柱手术患者全麻诱导期血流动力学及血浆皮质醇的影响[J]. 山东大学学报(医学版), 2209, 47(6): 76-79. |
| [2] | 李希,王秉翔,李娜,曹丽娜,李爱华,冠潇,张志勉. 下肢外骨骼机器人康复训练对脑卒中偏瘫患者下肢运动的影响[J]. 山东大学学报 (医学版), 2023, 61(3): 121-126. |
| [3] | 王政,孙小刚,李超,王连雷,李冬来,原所茂,田永昊,刘新宇. 机器人辅助MIS-TLIF与徒手开放TLIF治疗腰椎退行性疾病的比较:2年随访[J]. 山东大学学报 (医学版), 2023, 61(3): 97-106. |
| [4] | 乔桦,李慧武. 膝关节置换手术机器人应用现状与研究进展[J]. 山东大学学报 (医学版), 2023, 61(3): 29-36. |
| [5] | 刘新宇,李冬来,赵文龙,王政,李超,王连雷,原所茂,田永昊. 机器人/导航辅助下椎弓根螺钉植入在脊柱畸形矫正中的应用[J]. 山东大学学报 (医学版), 2023, 61(3): 21-28. |
| [6] | 吴南,仉建国,朱源棚,陈癸霖,陈泽夫. 人工智能在脊柱畸形诊疗中的应用[J]. 山东大学学报 (医学版), 2023, 61(3): 14-20. |
| [7] | 王辉,王连雷,吴天驰,田永昊,原所茂,王霞,吕维加,刘新宇. 人工智能辅助设计3D打印手术导板在脊柱侧凸矫形术中的应用[J]. 山东大学学报 (医学版), 2023, 61(3): 127-133. |
| [8] | 郭永园,孙厚义,张元凯,颜廷宾,刘培来,贾玉华. 鸿鹄机器人辅助全膝关节置换的早期学习曲线[J]. 山东大学学报 (医学版), 2023, 61(3): 115-120. |
| [9] | 李超,孙小刚,李昊,田永昊,原所茂,刘新宇,王连雷. 机器人联合三维“C”型臂辅助置钉在44例脊柱侧弯矫形术中的应用价值[J]. 山东大学学报 (医学版), 2023, 61(3): 107-114. |
| [10] | 刘亚军,袁强,吴静晔,韩晓光,郎昭,张勇. 130例锥形束CT影像腰椎椎弓根螺钉自动规划的初步分析[J]. 山东大学学报 (医学版), 2023, 61(3): 80-89. |
| [11] | 刘亚军,郎昭,郭安忆,刘文勇. 骨科冲击波治疗的智能化发展现状及趋势分析[J]. 山东大学学报 (医学版), 2023, 61(3): 7-13. |
| [12] | 匡风霞,赵晓虹,韩宝佳,高成杰. 对控制机器人甲状腺癌根治术患者手术应激反应麻醉深度的探讨[J]. 山东大学学报 (医学版), 2022, 60(5): 81-86. |
| [13] | 李明波,黄燕波,刘俊城,任东成,谭成双,徐继禧,丁金勇. 黄芪桂枝五物汤治疗强直性脊柱炎的网络药理学探讨[J]. 山东大学学报 (医学版), 2022, 60(3): 29-38. |
| [14] | 田辉,易文波,李树海. 达芬奇机器人食管癌切除术之齐鲁实践[J]. 山东大学学报 (医学版), 2022, 60(11): 28-32. |
| [15] | 庄大勇,贺青卿,李小磊,周鹏,岳涛,徐婧. 达芬奇机器人在儿童及青少年甲状腺癌中的应用[J]. 山东大学学报 (医学版), 2021, 59(1): 45-48. |
|